Ze względu na zainteresowanie czytelników prezentujemy szerzej temat zasygnalizowany w „IB” nr 9/2008.
Przez pojęcie bezwzględnych wartości przemieszczeń będziemy rozumieć przemieszczenia badanego obiektu względem jego otoczenia, szacowanego na obszar koła wokół badanego obiektu o średnicy ok. 0,6 km. Do określenia tych przemieszczeń proponujemy wykorzystać teodolit typu NON PRISM TOTAL STATIONS (dalmierz elektroniczny pozwalający dla krótszych odległości wykonać pomiar odległości do punktu bez ustawienia na nim lustra).
Prace terenowe
Wyznaczenie wielkości bezwzględnych przemieszczeń budowli wymaga założenia sieci zawierającej dwa rodzaje punktów. Pierwszy rodzaj to punkty odniesienia rozmieszczone poza zasięgiem przewidywanych przemieszczeń, drugi rodzaj to punkty kontrolowane umieszczone na badanym obiekcie. Punkty odniesienia w terenie zabudowanym stabilizujemy za pomocą trzpienia stalowego z krzyżem, wbitego w chodnik lub skraj jezdni, poza terenem zabudowanym jako stabilizację stosujemy słupy betonowe z trzpieniem stalowym. Punkty kontrolowane na badanym obiekcie zaznaczamy za pomocą specjalnego elementu plastikowego produkowanego w tym celu przez producentów sprzętu geodezyjnego.
Punkty odniesienia będące równocześnie stanowiskami instrumentu pomiarowego obieramy, kierując się następującymi zaleceniami:
Widoczność do możliwie największej liczny punktów, zarówno punktów odniesienia, jak i punktów kontrolowanych. W przypadku jeśli dysponujemy jedynie lustrem dalmierza umieszczonym na tyczce (a nie lustrem umieszczonym na statywie centrowanym nad punktem za pomocą pionu optycznego), obieramy punkty odniesienia, kierując się zaleceniem, aby z instrumentu ustawionego na wysokości ok. 1,5 m był widoczny trzpień punktu, na który celujemy, aby wysokość lustra nad punktem była możliwie niewielka, na przykład 10 cm, co zmniejszy błąd centrowania sygnału.
Kąt pomiędzy celową z punktu odniesienia do punktu kontrolowanego a płaszczyzną znaczka punktu kontrolowanego powinien być zbliżony do kąta prostego.
Liczba celowych do danego punktu nie powinna być mniejsza niż 3, jedynie w wyjątkowych przypadkach dopuszczalna jest liczba 2.
Punkty kontrolowane na badanym obiekcie obieramy w takiej liczbie i w taki sposób, aby określone przez nas ich przemieszczenia odzwierciedlały w pełni przemieszczenia badanego przez nas obiektu.
Tak założoną sieć kontrolną poddajemy pomiarowi tych samych elementów proponowanym przez nas instrumentem na początku (pomiar wyjściowy) i końcu (pomiar aktualny) interesującego nas czasu. Rzadko kiedy poprzestajemy na jednym okresie wyznaczenia przemieszczeń, kolejne pomiary aktualne (co miesiąc, kwartał, rok) powtarzamy aż do stwierdzenia zaniku przemieszczeń, przy czym zawsze początkiem okresu wyznaczenia przemieszczeń jest czas wykonania pomiaru wyjściowego. Pomiarowi proponowanym na wstępie instrumentem z punktów odniesienia podlegają odległość, kierunek oraz kąt pionowy. Dodatkowo w skład każdej serii pomiarów wchodzą pomiary niwelacji precyzyjnej obejmujące jedynie punkty odniesienia danej sieci.
Opracowanie wyników pomiaru
Prace obliczeniowe rozpoczynamy od określenia w układzie lokalnym współrzędnych wszystkich punktów sieci. Jako początek lokalnego układu współrzędnych przyjmujemy punkt położony na rysunku blisko lewego dolnego narożnika, nadając mu wszystkie trzy współrzędne wyrażone w metrach równe 100. Kierunek osi X przyjmujemy równoległy lub prostopadły do dominującego na danym obiekcie kierunku, np. drogi, kierunku rzeki lub przybliżonego kierunku północnego wyznaczonego za pomocą busoli. Współrzędne wszystkich pozostałych punktów określamy na podstawie wyników pomiary wyjściowego.
Określenie, których punktów odniesienia stałość w okresie pomiędzy pomiarem wyjściowym a aktualnym potwierdzają wykonane pomiary, nosi nazwę identyfikacji punktów stałych, a spełniające warunki stałości punkty nazywany punktami stałymi lub dopasowania. Czynność identyfikacji punktów stałych proponujemy wykonać dwuetapowo. Na podstawie wyników pomiarów niwelacyjnych w pomiarze wyjściowym i aktualnym możemy ustalić, które punkty odniesienia spełniają kryteria stałości w płaszczyźnie pionowej. Następnie badamy, które z punktów spełniających kryteria stałości w płaszczyźnie pionowej uzyskały potwierdzenie tej stałości w płaszczyźnie poziomej na podstawie pomiarów odległości, kierunków i kątów pionowych pomierzonych Total Stations.
Czynność identyfikacji punktów stałych polega na ustaleniu, które zmiany wyników obserwacji mieszczą się w granicach nieuniknionych drobnych błędów przypadkowych pomiaru, a które zmiany wielkości pomierzonych są wynikiem wzajemnego przemieszczenia się położenia punktów odniesienia, podają je [1, 2, 3].
Mając ustalone, które punkty odniesienia zachowały stałość w interesującym nas okresie, opierając się na tych punktach, możemy określić przemieszczenia punktów kontrolowanych na badanym obiekcie oraz przemieszczenia punktów odniesienia niespełniających kryterium stałości.
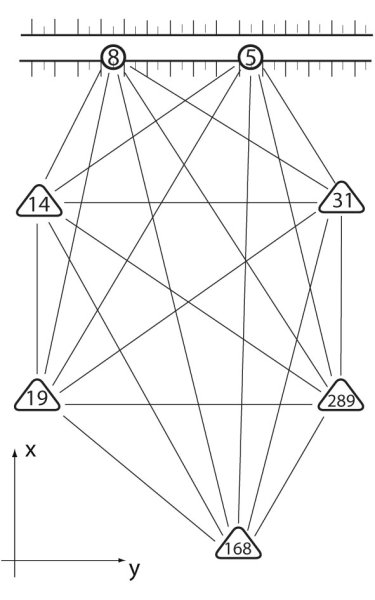
Rys. 1. Sieć Sanok
Przykład terenowy
Proponowane rozwiązanie zagadnienia wyznaczenia przemieszczeń budowli przedstawimy na przykładzie małej sieci o nazwie Sanok pokazanej na rysunku.
Sieć tę założono w celu kontroli stabilności zapory wodnej na korpusie, której założono dwa punkty kontrolowane o numerach 8 i 5 zaznaczone na rysunku kółkami oraz pięć punktów odniesienia rozmieszczonych poza zasięgiem przewidywanych przemieszczeń oznaczonych na rysunku trójkątami.
W sieci Sanok jako punkt początkowy lokalnego układu współrzędnych przyjęto punkt 19, nadając mu wszystkie 3 współrzędne równe 100 m w celu uniknięcia współrzędnych ujemnych. Jako kierunek osi X przyjęto kierunek na punkt 14. Przy tych założeniach współrzędne pozostałych punktów sieci określono, wykorzystując wyniki pomiaru wyjściowego, korzystając z programu DNAX.
Dla określenia interesujących nas PRZEstrzennych przemieszczeń opracowano system informatyczny PRZE. Składa się on z trzech współpracujących ze sobą programów o skróconych nazwach I, J oraz K, przy czym pełne nazwy tych programów to nazwy skrócone poprzedzone nazwą systemu, a więc PRZEI, PRZEJ oraz PRZEK.
Istotne jest określenie dwóch zbiorów – zbioru na wejściu oraz zbioru na wyjściu. Zbiorem na wejściu są wyniki pomiarów poprzedzone dodatkowymi niezbędnymi danymi.
Dla naszej sieci Sanok zbiór na wejściu przedstawia tabela 1. Tabelę tę otrzymujemy, wykonując szczegółowo objaśnione polecenia wydawane (w języku polskim lub niemieckim) przez program edytorski I. Nie będziemy przytaczać tych poleceń, natomiast omówimy dane tabeli 1 w celu wskazania ewentualnemu użytkownikowi systemu, jakimi danymi musi dysponować, chcąc wyznaczyć przemieszczenia proponowanym w niniejszej pracy systemem PRZE.
I tak wiersz lub wiersze:
1 nazwa obiektu, tu SANOK, pokrywająca się najczęściej z nazwą miejscowości, w której się dany obiekt znajduje,
2 identyfikator języka – podanie cyfry 0 oznacza żądanie uzyskiwania poleceń w języku polskim, cyfra 1 sugeruje język niemiecki,
3 i 4 wyraża, że w opracowywanej sieci pierwsze 5 punktów zamieszczonego niżej wykazu to punkty odniesienia, z których 4 muszą spełniać kryteria stałości, aby wyznaczone przemieszczenia były wiarygodne,
5 dopuszczalna wartość różnicy obserwacji danego elementu uzyskanych z pomiaru wyjściowego i aktualnego, jej przekroczenie sugeruje omyłkę (błąd gruby) i powoduje wstrzymanie wykonywania obliczeń do wyjaśnienia,
6 podane wartości 2,5 i 1 należy powtórzyć, ich uzasadnienie wymagałoby szczegółowego omówienia kryterium stałości, co w tym opracowaniu pominięto,
7 przekroczenie przez błąd Ferrero (określany jako niezgodność sumy pomierzonych w trójkącie kątów z wartością teoretyczną 180 stopni starego podziału lub 200 nowego podziału) tej wartości sugeruje omyłkę w wynikach pomiaru kierunków i powoduje zawieszenie pracy programu do wyjaśnienia, podanie wartości 0 oznacza rezygnację z liczenia błędu Ferrero,
8 od tego wiersza dane dotyczą pomiaru wyjściowego, a mianowicie:
9 wartość stała błędu średniego pomiaru długości wynosi 2,5, wartość błędu średniego pomiaru długości proporcjonalna do odległości wynosi 3, błąd średni pomiaru kierunku wynosi 5, a błąd średni pomiaru kąta pionowego wynosi 6, przy czym wszystkie błędy średnie wartości liniowych wyrażone są w mm, a błędy średnie wartości kątowych w sekundach (nowego podziału),
10 zawiera informację, że poprawka za błąd instrumentu zwany kolimacją wynosi –3, poprawka inklinacji to liczba 4, a poprawka miejsca zera koła pionowego to liczba 2, wszystkie te trzy wartości wyrażone są w sekundach nowego podziału,
11–13 zawierają informacje analogiczne do zawartych w wierszach 8−10, lecz dotyczą pomiaru aktualnego,
14 opis tabeli,
15–22 numery i współrzędne punktów wyrażone w metrach, zestawione w kolejności 5 punktów odniesienia i 2 punkty kontrolowane, zakończone identyfikatorem końca o liczbie zer równej ilości liczb w poprzednim wierszu, przy czym jeśli to możliwe, wskazane jest, aby w ostatnich dwóch wierszach dotyczących punktów kontrolowanych umieszczono punkty o możliwie najmniejszych przemieszczeniach,
23–24 daty pomiaru wyjściowego i aktualnego, podane w apostrofach (górnych przecinkach), zawierające nie więcej niż 10 znaków,
25 w przypadku wykonywania pomiaru niwelatorem precyzyjnym typu ZEISS odczyty wykonywane są w 1/200 mm, czyli chcąc uzyskać poszukiwane różnice wysokości w mm, należy różnice odczytów podzielić przez współczynnik skali równy 200, w przypadku podawania różnic wysokości w mm jako współczynnik skali wpisujemy 1,
26–27 opis kolumn zamieszczonych niżej wyników pomiarów niwelacji precyzyjnej,
28 wyraża, że w pomiarze wyjściowym pomiędzy punktami 14–19 stwierdzono różnicę -60 000 przy dwóch ustawieniach niwelatora, różnicę wysokości pomiędzy tymi samymi punktami w pomiarze aktualnym uzyskano -60050 również przy dwóch ustawieniach instrumentu, przy czym aby uzyskać różnice wysokości w mm, w programie wartości te zostaną podzielone przez podany wyżej współczynnik skali, tu 200,
29 i dalej podobnie jak wiersz poprzedni, zakończone identyfikatorem końca, objaśnionym poprzednio,
37–38 opis kolumn zamieszczonych niżej wyników pomiaru total stations,
39 zawiera informację, że w pomiarze wyjściowym z punktu 14 na 19 wykonano pomiar odległości skośnej, uzyskując wartość równą 100 016, przy wyzerowanym kątomierzu koła poziomego, odczyt koła pionowego równy 1 006 376 uzyskano przy celowaniu na sygnał (lustro) na wysokości 800, dalej w pomiarze aktualnym odczytano długość skośną równą 100 006, również przy wyzerowanym kątomierzu koła poziomego, oraz kąt pionowy 1 006 048, celując na lustro na wysokości 900, podobnie zestawiono wyniki pomiaru na punkt 8 w wierszu 40 oraz na punkt 5 w wierszu 41, jednak celując bezpośrednio na znaczek punktu kontrolowanego, wszędzie (prócz wykazu współrzędnych punktów) wartości liniowe wyrażono w milimetrach, a kątowe w sekundach (nowego podziału),
42 zapis wiersza oznacza, że w pomiarze wyjściowym z punktu 14 na 31 uzyskano odległość skośną 100 510, odczyt kierunku wyniósł 2 996 856, odczyt kąta pionowego 1 006 334 przy celowaniu na lustro umieszczone na wysokości 600, te same elementy pomierzone w pomiarze aktualnym zamieszczono dalej w tym wierszu, w jednostkach podobnych jak poprzednio,
43–63 dane jak poprzednio, zakończone objaśnionym identyfikatorem końca.
Nie można wykluczyć, że w sieci wyznaczenia przemieszczeń wystąpią mierzone boki do punktów kontrolowanych, których długość przekracza dopuszczalny zakres pomiaru bezlustrowego danego dalmierza. W omawianym przykładzie występuje to na bokach 19–8, 19–5, 289–8 i 289–5, w wierszach 54, 55, 58 i 59. Wówczas w miejsce wyniku pomiaru boku wpisujemy cyfrę 7 i wartość ta jest ignorowana przy opracowaniu wyników pomiaru.
Jeśli tak zestawione wyniki pomiaru wyjściowego i aktualnego, poprzedzone dodatkowymi danymi zawartymi w górnej części tabeli 1, poddamy opracowaniu programem J, otrzymamy zbiór na wyjściu przedstawiony w tabeli 2.
Zbiór ten zawiera odpowiedź na nurtujące nas pytanie, które punkty odniesienia w interesującym nas okresie pomiędzy datą wykonania pomiaru wyjściowego i aktualnego zachowały wzajemną stałość, co sygnalizuje litera C (constans) po prawej stronie tabeli w wierszu danego punktu. W sieci Sanok warunki stałości spełniły punkty odniesienia 14, 31, 289 i 19, punkt 168 nieznacznie przekroczył kryteria stałości. W przedstawionej sieci Sanok część zapory reprezentowana przez punkt 8 uległa przemieszczeniu w kierunku przeciwnym do przyjętego kierunku osi X o wartość niecałe 100 mm, część zapory reprezentowana przez punkt 5 uległa przemieszczeniu w tym samym kierunku o wartość blisko 50 mm. Zgodnie z przewidywaniem nie stwierdzono przemieszczeń obiektu w kierunku prostopadłym do przyjętego kierunku osi X, czyli osi Y.
Oba punkty kontrolowane sugerują równomierne osiadanie zapory, które w rozpatrywanym czasie wyniosło ok. 100 mm.
Jeśliby udało się nam w terenie tak rozmieścić punkty odniesienia, aby z instrumentów ustawionych nad wszystkimi punktami odniesienia na wysokości ok. 1,5 m był widoczny trzpień punktu, na który wykonujemy pomiar, a więc tę samą wysokość lustra np. 10 cm można by stosować na wszystkich punktach odniesienia, kolumny wysokości sygnałów (6 i 10) zbioru na wejściu (tabela 1) można by opuścić i przemieszczenia wyznaczyć, poddając tak powstały zbiór na wejściu opracowaniu programem J7.
Wyniki pomiaru pierwszych dwóch serii pomiarów zestawiamy pod dyktando poleceń wydawanych przez program I. Po trzeciej i ewentualnie następnych seriach pomiaru możemy w zbiorze na wejściu wprowadzić korektę, korzystając z programu K, co nie wymaga powtórnego „wklepywania” wyników pomiaru wyjściowego.
Procedura udostępnienia systemu informatycznego PRZE
Wykonawcom pomiarów zainteresowanym proponowanym sposobem wyznaczenia przemieszczeń będą udostępnione nieodpłatnie wersje binarne programów I oraz K. Proponuje się, aby wykonawca pomiarów po wykonaniu dwóch serii pomiarów zestawił swoje wyniki pod dyktando poleceń wydawanych (w języku polskim lub niemieckim) przez program I, a następnie przesłał je autorowi opracowanego sposobu wyznaczenia przemieszczeń.
Opracowane wyniki pomiarów przemieszczeń w postaci przedstawionej w tablicy 2 zostaną przesłane tą samą drogą do wykonawcy pomiarów.
Po kolejnej serii pomiarów wykonawca będzie korygował zbiór na wejściu o wyniki ostatniej serii pomiarów programem K.
dr inż. Stanisław Lisiewicz
katgeo@up.poznan.pl
Literatura
1. I. Laudyn, Obliczenie przemieszczeń poziomych budowli, Prace Instytutu Geodezji i Kartografii, tom XXVII, zeszyt 1(64)/1980.
2. S. Lisiewicz, Prüfung der Stabilität der Bezugspunkte und Bestimmung der Horizontalverschiebung von Objekten, „Allgemeine Vermessungs-Nachrichten” 10/2005.
3. S. Lisiewicz, Bestimmung von Bauwerkverschiebungen unter Verwendung von reflektorlos messenden Tachymetern, „AVN” 4/2008.
|
1
|
Nazwa obiektu
|
Sanok
|
||||||
|
2
|
Identyfikator języka
|
|
|
0
|
|
|
|
|
|
3
|
Liczba punktów odniesienia
|
|
|
5
|
|
|
|
|
|
4
|
Minimalna liczba punktów dopasowania
|
4
|
|
|
|
|
|
|
|
5
|
Dopuszczalna różnica obserwacji
|
8000.0
|
|
|
|
|
|
|
|
6
|
Maksymalny i minimalny EL
|
|
|
2.5
|
|
1.0
|
|
|
|
7
|
Dopuszczalny błąd Ferrero
|
|
25.0
|
|
|
|
|
|
|
8
|
Dla pomiaru wyjściowego
|
|
|
|
|
|
|
|
|
9
|
Błędy średnie pomiarów
|
|
|
2.5
|
3.0
|
5.0
|
6.0
|
|
|
10
|
Poprawka kolimacji, inklinacji, zera
|
|
|
-3.0
|
4.0
|
2.0
|
|
|
|
11
|
Dla pomiaru aktualnego
|
|
|
|
|
|
|
|
|
12
|
Błędy średnie pomiarów
|
|
|
3.0
|
4.0
|
6.0
|
5.0
|
|
|
13
|
Poprawka kolimacji, inklinacji, zera
|
|
|
3.0
|
-2.0
|
-4.0
|
|
|
|
14
|
Punkty sieci i ich współrzędne
|
|
|
|
|
|
|
|
|
15
|
|
14
|
|
200.001
|
100.000
|
100.300
|
|
|
|
16
|
|
31
|
200.499
|
200.504
|
100.200
|
|
|
|
|
17
|
|
289
|
|
99.997
|
200.501
|
100.100
|
|
|
|
18
|
|
168
|
|
50.251
|
149.752
|
100.168
|
|
|
|
19
|
|
19
|
|
100.00
|
100.000
|
100.000
|
|
|
|
20
|
|
8
|
|
299.848
|
131.000
|
100.500
|
|
|
|
21
|
|
5
|
|
300.145
|
171.502
|
100.400
|
|
|
|
22
|
|
0
|
|
0.000
|
0.0000
|
0.000
|
|
|
|
23
|
Data pomiaru wyjściowego
|
’23.03.2004’
|
|
|
|
|
|
|
|
24
|
Data pomiaru aktualnego
|
’24.06.2007’
|
|
|
|
|
|
|
|
25
|
Współczynnik skali niwelacji
|
200.0
|
|
|
|
|
|
|
|
26
|
Wyniki pomiaru niwelatorem
|
|
|
|
|
|
|
|
|
27
|
|
|
wyjściowego
|
|
aktualnego
|
|
||
|
28
|
|
|
14
|
19
|
-60000.0
|
2
|
-60050.0
|
2
|
|
29
|
|
|
19
|
289
|
20050.0
|
2
|
20000.0
|
2
|
|
30
|
|
|
289
|
31
|
20000.0
|
2
|
20050.0
|
2
|
|
31
|
|
|
31
|
14
|
20050.0
|
2
|
20000.0
|
2
|
|
32
|
|
|
14
|
289
|
-40000.0
|
2
|
-40050.0
|
2
|
|
33
|
|
|
19
|
31
|
40050.0
|
2
|
40000.0
|
2
|
|
34
|
|
|
19
|
168
|
336000
|
2
|
32000.0
|
2
|
|
35
|
|
|
168
|
289
|
-13600.0
|
2
|
-12000.0
|
2
|
|
36
|
|
|
0
|
0
|
0
|
0
|
0
|
0
|
Tab. 1. Zbiór na wejściu
|
37
|
Wyniki pomiaru total stations
|
|||||||||
|
38
|
|
|
|
wyjściowego
|
|
aktualnego
|
|
|
|
|
|
39
|
14
|
19
|
100016
|
0
|
1006376
|
800
|
1000006
|
0
|
1006048
|
900
|
|
40
|
14
|
8
|
104556
|
2191659
|
1007916
|
0
|
104472
|
2191830
|
1008847
|
0
|
|
41
|
14
|
5
|
123068
|
2394739
|
1007253
|
0
|
123023
|
2394885
|
1008021
|
0
|
|
42
|
14
|
31
|
100510
|
2996856
|
1006334
|
600
|
100520
|
2996846
|
1006027
|
700
|
|
43
|
14
|
289
|
141792
|
3498422
|
1004490
|
700
|
141782
|
3498432
|
1004266
|
800
|
|
44
|
14
|
168
|
157801
|
3795798
|
1003357
|
800
|
157810
|
3795798
|
1003197
|
900
|
|
45
|
31
|
289
|
100518
|
0
|
1006978
|
600
|
100507
|
0
|
1006334
|
750
|
|
46
|
31
|
168
|
158591
|
207373
|
1003541
|
750.
|
158591
|
207363
|
1003583
|
800
|
|
47
|
31
|
19
|
142145
|
499997
|
1005161
|
650
|
142135
|
499997
|
1004927
|
750
|
|
48
|
31
|
14
|
100508
|
996837
|
1004751
|
750
|
100518
|
996827
|
1004444
|
850
|
|
49
|
31
|
8
|
121264
|
1611351
|
1006836
|
0
|
121174
|
1611060
|
1007618
|
0
|
|
50
|
31
|
5
|
103790
|
1819684
|
1008588
|
0
|
103759
|
1819597
|
1009521
|
0
|
|
51
|
289
|
168
|
71078
|
0
|
1006567
|
600
|
71067
|
0
|
1005285
|
700
|
|
52
|
289
|
19
|
100505
|
493675
|
1005701
|
600
|
100513
|
493665
|
1004127
|
800
|
|
53
|
289
|
14
|
141790
|
992068
|
1002255
|
700
|
141780
|
992078
|
1002470
|
600
|
|
54
|
289
|
8
|
7
|
1280591
|
1003009
|
0
|
7
|
1280482
|
1003171
|
0
|
|
55
|
289
|
5
|
7
|
1402045
|
1003473
|
0
|
7
|
1402035
|
1003621
|
0
|
|
56
|
289
|
31
|
100504
|
1493675
|
1003801
|
700
|
100513
|
1493665
|
1002860
|
800
|
|
57
|
19
|
14
|
100012
|
0
|
1003193
|
600
|
100002
|
0
|
1003183
|
700
|
|
58
|
19
|
8
|
7
|
97981
|
1002833
|
0
|
7
|
98019
|
1003474
|
0
|
|
59
|
19
|
5
|
7
|
218437
|
1002995
|
0
|
7
|
218492
|
1003595
|
0
|
|
60
|
19
|
31
|
142131
|
500026
|
1002240
|
700
|
142142
|
500016
|
1003145
|
600
|
|
61
|
19
|
289
|
100513
|
1000014
|
1004444
|
600
|
100503
|
1000029
|
1004434
|
700
|
|
62
|
19
|
168
|
70360
|
1499991
|
1004814
|
700
|
70370
|
1499981
|
1004896
|
800
|
|
63
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
Tab. 1 – Cd. Zbiór na wejściu
|
Nazwa obiektu – Sanok
Przemieszczenia w okresie od 23.03.2004 do 24.06.2007
Błąd średni pojedynczej obserwacji w układzie zrównoważonym mo = 1,58
Współczynnik kryterium stałości = 2,5
|
||||||||||
|
Nr
punktu
|
Przemieszczenia
|
Błędy średnie
|
Błędy maksymalne
|
|
||||||
|
DX
|
DY
|
DZ
|
MX
|
MY
|
MZ
|
MX
|
MY
|
MZ
|
||
|
14
31
289
168
19
8
5
|
-1,0
0,7
-0,5
1,1
0,8
-97,0
-47,6
|
0,5
-0,2
-0,7
1,5
0,4
-0,5
0,4
|
0,3
-2,0
1,0
-9,4
0,7
-102,2
-99,8
|
1,1
1,1
1,1
2,0
1,1
3,6
3,6
|
0,9
0,9
1,0
1,4
1,0
1,7
1,7
|
0,6
0,6
0,6
0,9
0,6
1,4
1,4
|
2,8
2,8
2,8
5,1
2,8
9,0
9,1
|
2,4
2,4
2,6
3,5
2,6
4,3
4,3
|
1,5
1,5
1,4
2,3
1,4
3,4
3,4
|
C
C
C
C
|
Tab. 2. Zbiór na wyjściu




