Projektowanie obiektów w technologii BIM nie jest w Polsce już nowinką technologiczną, ale posługiwanie się narzędziami do zintegrowanego planowania 4D i 5D jest nią.
Efektywne pod względem organizacyjnym planowanie robót budowlanych jest kluczową częścią procesu inwestycyjnego, szczególnie w czasach, w których czas i koszty przeznaczone na ich realizacje odgrywają nadrzędne role. Efektywność organizacyjna obejmuje szeroki zakres zagadnień związanych z planowaniem i harmonogramowaniem robót, wykonywanych według konkretnej technologii, i oceną jakości utworzonego harmonogramu przez planującego. Wspomagać proces planowania budowy mogą systemy:
– informatyczne z zakresu ERP,
– zarządzania jakością lub bezpieczeństwem,
– wielowymiarowego projektowania konstrukcji (3D) i planowania realizacji robót (4D, 5D).
Narzędzia te pozwalają przede wszystkim na:
– kontrolę wykonania projektu (wyszukiwanie kolizji konstrukcyjnych lub infrastrukturalnych, zanim elementy te zostaną wykonane);
– analizę wydajności i jakości wykonywanych robót przez śledzenie postępu i kosztów robót oraz porównywanie z planem bazowym, jak również analizę pracy, dostępności i wykorzystania zasobów czynnych;
– koordynację projektu i przekazywanie w czasie rzeczywistym informacji wszystkim uczestnikom procesu budowlanego (projektantowi, kierownikowi robót, kierownikowi projektu itp.).
Coraz częściej tego typu rozwiązania są wdrażane przez polskie firmy, co zostało opisane w [1]. Nie jest to jednak praktyka częsta, podczas gdy w Skandynawii, krajach Dalekiego Wschodu czy USA zintegrowane narzędzia do zarządzania budową są stosowane powszechnie. Z użyciem narzędzi 4D i 5D wybudowano np. Kamppi Centre, Varma Samisaari Office Complex (Finlandia) czy Ritz Carlton Highlands Lodge Resort and Spa (Kalifornia). Taki stan wynikać może zarówno z wysokich kosztów samego oprogramowania oraz jego wdrożenia, jak również samej, szeroko rozumianej, kultury budowania i potrzeby stosowania tak zaawansowanych narzędzi. O ile projektowanie obiektów w technologii BIM nie jest w Polsce już nowinką technologiczną, o tyle posługiwanie się narzędziami do zintegrowanego planowania 4D i 5D już nią jest.
Żeby móc się przekonać, jakie korzyści niesie ze sobą planowanie budowy z zastosowaniem nowoczesnych wielowymiarowych narzędzi typu 4D i 5D, warto poznać metodykę takiego planowania. W niniejszej pracy zaprezentowano jedną z technik planowania, location-based scheduling (LBS), wykorzystywaną w systemach do planowania 4D i 5D, takich jak np. PlanManProject 2012 (4D) czy Vico® (5D).

Rys. 1 Definiowanie działek roboczych na modelu 3D, widok z programu Vico (opracowanie własne)
Podstawowe metody planowania przedsięwzięć budowlanych
W teorii inżynierii przedsięwzięć budowlanych funkcjonuje wiele metod modelowania procesów budowlanych. Do najczęściej spotykanych należą wprowadzone w latach 50. XX w. metody wykorzystujące sieci zależności między czynnościami. Do tej grupy należą m.in.: metoda ścieżki krytycznej CPM (Critical Path Method), metody RAMPS (Resources Allocation and Multi-Project Sheduling) PERT (Program Evaluation and Review Technique), GERT (Graphical Evaluation and Review Technique) czy metoda sprzężeń czasowych TCM (Time Couplings Method). Wymienione metody mają charakter uniwersalny i wykorzystywane są głównie w modelowaniu przedsięwzięć o charakterze niepowtarzalnym, z dużą liczbą operacji.
Do planowania przedsięwzięć powtarzalnych lub związanych z realizacją obiektów liniowych wykorzystywać można, poza wyżej wymienionymi, grupy technik opartych np. na metodzie linii bazowej. Line of Balance i LSM (Linear Scheduling Method). Metody te nie zyskały na przestrzeni lat tak szerokiej popularności jak metody sieciowe – głównie ze względu na brak stosownego oprogramowania, przez co pozostawały na długo metodami „ręcznymi” – graficznymi. Tradycyjne metody sieciowe, mimo swojej uniwersalności oraz bogactwa dostępnego oprogramowania, nie dają planiście możliwości bezpośredniej analizy i optymalizacji pracy zasobów. Inżynier budownictwa – planista, mając do dyspozycji aplikację do harmonogramowania (np. MsProject, Planista), przeważnie kalkuluje czas trwania prac na podstawie odrębnie przygotowanego przedmiaru, a kontrolę jakości harmonogramu i postępu prac prowadzi, korzystając z dostępnych w aplikacji komputerowej lub samodzielnie przygotowanych arkuszy pracy zasobów, analizując je łącznie z dokumentacją projektową. Każdorazowa zmiana zakresu robót wymaga ponownego skalkulowania nakładów pracy i ręcznej modyfikacji modelu. Wraz z rozwojem technik informatycznych i jednoczesnym wzrostem liczby potężnych inwestycji liniowych mających charakter powtarzalny w niektórych krajach powróciło zainteresowanie metodami opartymi na technice linii bazowej. W 2004 r. zaproponowano nową jakościowo technikę zarządzania procesem budowlanym – location-based management system – system planowania i zarządzania przedsięwzięciami, „skoncentrowany” na działce, na której wykonywane są prace [2]. Podejście to wykorzystuje metodę harmonogramowania określaną jako LBS, w odróżnieniu od ABS (activity-based scheduling) – harmonogramowania skoncentrowanego wyłącznie na zadaniach produkcyjnych. Metoda LBS wykorzystuje reguły planowania według zasad pracy równomiernej i jednocześnie (dzięki oprogramowaniu komputerowemu) pozwala bezpośrednio analizować i uwzględniać w planowaniu specyfikę działki roboczej – zakres i charakter robót do wykonania oraz powiązania między działkami, jakie tworzy planujący w strukturze obiektu. Przydatność LBS jest niewątpliwie zależna od znajomości przez planistę i umiejętności posługiwania się technikami BIM, które stanowią punkt wyjścia do zintegrowanego wspomagania planowania budowy [3].
Rys. 2 Tworzenie relacji zewnętrznej poziomu 2, widok z programu Vico (opracowanie własne)
Elementy składowe zintegrowanego wspomagania planowania robót z zastosowaniem LBS Etap projektowania 3D
Aby móc przystąpić do planowania budowy w wymiarze 4D i wyższym, należy dysponować trójwymiarowym modelem obiektu (3D), w którym każdy element konstrukcyjny (lub instalacyjny) jest dokładnie zdefiniowany pod względem lokalizacji w obiekcie, wymiarów, zastosowanego materiału, jego ilości oraz sposobu wykonania. Stworzenie takiego modelu jest zadaniem projektanta. Na tym etapie ma on możliwość kontroli wykonalności konstrukcji i poprawności przyjętych rozwiązań. Etap ten obejmuje usuwanie kolizji z instalacjami, infrastrukturą, modelowanie węzłów itp. Poprawność zdefiniowania obiektu 3D warunkuje sprawny przebieg przedmiarowania robót i dalej ich planowania.
Etap planowania 4D z zastosowaniem LBS
Planowanie 4D obejmuje: przedmiarowanie robót, określenie struktury podziału pracy i działek roboczych oraz harmonogramowanie robót. Zakresy i ilości robót generowane są automatycznie na podstawie danych ilościowych i jakościowych zapisanych w modelu 3D obiektu. Etap ten przebiega zazwyczaj w programie planistycznym, do którego importuje się model 3D. Planista wskazuje w modelu zakres elementów obiektu do wykonania, generując tym samym działki robocze. Mogą to być konkretne kondygnacje, elewacje, odcinki między osiami lub węzłami obiektu liniowego itp. (rys. 1).
Samo modelowanie przebiegu robót opiera się na tworzeniu równorzędnych powiązań logicznych między zadaniami (robotami) i działkami. W metodyce LBS wyróżnia się pięcio- warstwową logikę powiązań:
– poziom 1 – powiązania „zewnętrzne”, nadrzędne między robotami – wskazuje się tu powiązania między robotami, które są stałe w całym harmonogramie, niezależnie od działki, na której są wykonywane prace, np. układanie rurociągów zawsze jest poprzedzone robotami ziemnymi;
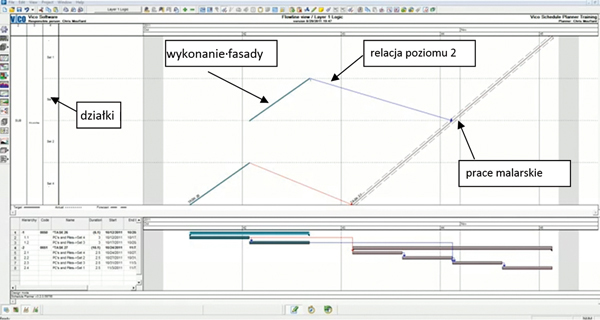
– poziom 2 – powiązania „zewnętrzne” między robotami o większym poziomie dokładności – są to połączenia logiczne zadań odnoszących się do tej samej działki roboczej, stosowane w sytuacji gdy połączenie z poziomu 1 nie zapewnia poprawnego technologicznie rozpoczęcia lub zakończenia zadania (przykład 1);
– poziom 3 – powiązania „wewnętrzne” między tymi samymi zadaniami wykonywanymi w różnych lokalizacjach; relacje formułowane na tym etapie mają na celu zapewnienie
płynności wykonywania pojedynczego zadania, realizowanego na kolejnych działkach. Planista ma tu możliwość określenia ograniczenia warunków rozpoczęcia zadania – czy ma się ono rozpocząć po zwolnieniu działki czy zasobu;
– poziom 4 – dodatkowe powiązania logiczne oraz nadawanie zwłoki cyklicznej między zadaniami realizowanymi na różnych działkach oraz między samymi działkami (przykład 2);
– poziom 5 – dowolne powiązania między różnymi zadaniami w różnych lokalizacjach, które nie zostały zdefiniowane wcześniej.
Rys. 3 Tworzenie relacji na poziomie 4, widok z programu Vico (opracowanie własne)
Do definiowania powiązań używa się typowych relacji stosowanych w metodach sieciowych, tj.: rozpoczęcie-rozpoczęcie, zakończenie-zakończenie, zakończenie-rozpoczęcie i rozpoczęcie-zakończenie bez czasów zwłoki. Jest to bardzo duże uproszczenie, pozwalające na redukcję powtarzalnych relacji, spotykanych w tradycyjnych metodach sieciowych. PRZYKŁAD 1: Na poziomie 1 określono relację: wykonanie fasady poprzedza wykonanie prac malarskich i prace te wykonywane są na tych samych dwóch działkach. Zgodnie z logiką poziomu 1 automatycznie po zakończeniu montażu fasady na działce 1 rozpoczną się na tej działce prace malarskie. Jeżeli planista chce tego uniknąć i prace malarskie rozpocząć po zamknięciu budynku fasadami, musi na tym etapie uszczegółowić relację, tj. prace malarskie rozpocznij po zakończeniu montażu fasady na ostatniej działce.Sytuację tę pokazuje rys. 2.
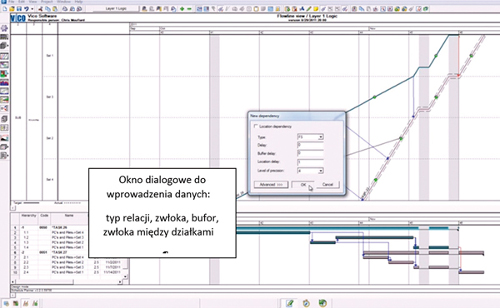
PRZYKŁAD 2: W budowie wielokondygnacyjnego obiektu żelbetowego, w trakcie wykonywania stropu nad kondygnacją n, nie jest możliwe prowadzenie robót na kondygnacji n-1 i ew. n-2 ze względu na konstrukcję wsporczą deskowania. Prace mogą być prowadzone na kondygnacjach niższych. Rozpoczęcie na działce n-2 i n-1 robót, które połączone są logicznie z zadaniem wykonanie stropu żelbetowegorelacją poziomu 1 lub 2, może nastąpić po upływie zadeklarowanego przez planistę czasu zwłoki (tu dojrzewania betonu w deskowaniu) lub z przesunięciem o 1 lub 2 działki robocze. Na rys. 3 przedstawiono przykładowy widok i okno dialogowe, w których planista określa na poziomie 4 relacji zwłokę, bufory, typ relacji między zadaniami oraz zwłokę między działkami. Tego typu zależność nie jest możliwa do sformułowania w typowych metodach sieciowych i programach do planowania.
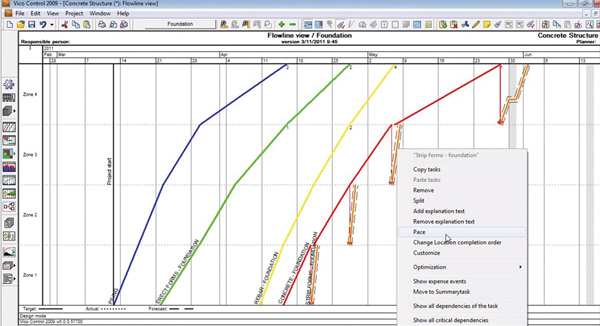
Rys. 4a Zastosowanie ograniczenia typu „zapewnij ciągłość pracy”, widok z programu Vico (opracowanie własne)
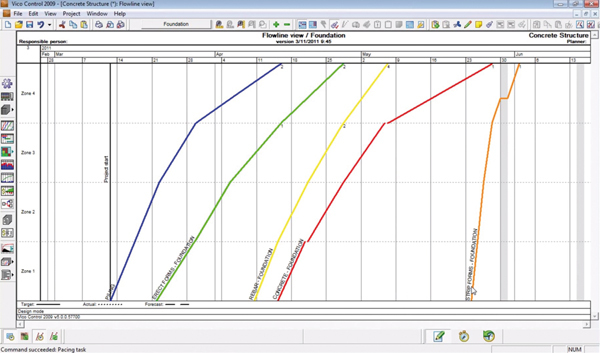
Rys. 4b Efekt wprowadzenia ograniczenia typu „zapewnij ciągłość pracy”, widok z programu Vico (opracowanie własne)
Projektowanie 5D
Etapem końcowym procesu planistycznego jest planowanie w wymiarze 5D. Obejmuje ono zintegrowany system kontroli planowanych i rzeczywistych przepływów pieniężnych, postępu robót, dostępności zasobów na poszczególnych działkach, dotrzymania prognozowanych terminów oraz analizę ryzyka. Na tym etapie dokonuje się zatem oceny jakości sporządzonego planu, a ewentualne korekty prowadzi się bezpośrednio na modelu 3D lub 4D, modyfikując tempo lub kolejność robót, zmieniając relacje i ograniczenia zadań, dodając bufory czasowe, dzieląc lub scalając zadania lub działki.
Kontrolę jakości harmonogramu można analizować w kontekście wykorzystania zapotrzebowanych zasobów. Można w tym celu posługiwać się wykresami pracy zasobów, znanymi z aplikacji do planowania sieciowego (np. MsProject).
Drugim aspektem oceny jakości harmonogramu jest zapewnienie ciągłości pracy brygad bądź ciągłości pracy na działkach. Planujący może zadeklarować, które zadanie ma być wykonywane w sposób ciągły, rezygnując z ograniczenia „rozpocznij jak najwcześniej” i zastępując je ograniczeniem typu „zapewnij ciągłość pracy”. Zobrazowano to na rys. 4a i 4b. Zadanie betonowanie fundamentów wraz z pielęgnacją(linia czerwona) jest zadaniem ciągłym, a jego następnik – zadanie demontaż deskowania(linia pomarańczowa) – zadaniem o większym tempie, ale bez zapewnionej ciągłości, co wynika z ograniczenia rozpoczęcia tego zadania typu jak najwcześniej.Planista może zrezygnować z tego ograniczenia i zastąpić je ograniczeniem typu zapewnij ciągłość pracy(rys.4a). Nowy cyklogram zadania oznaczono na rys. 4b. Zmiana ograniczenia powoduje opóźnienie rozpoczęcia zadania demontaż deskowania.Planista musi samodzielnie dokonać oceny, jak zmiana ta wpływa na alokację zasobów i poziom ich wykorzystania. W przypadku niektórych zadań opłacalne może być zlikwidowanie przestoju dostępnych w tym czasie zasobów (np. specjalistycznych brygad lub sprzętu wynajmowanych do konkretnego zadania). Opóźnienie rozpoczęcia zadania oznaczać też może ponadnormatywne przetrzymywanie zasobu, np. deskowania na konstrukcji, co powoduje, że nie może on być wykorzystywany w innych pracach (lokalizacjach), co z kolei można uznać za rozwiązanie niekorzystne. Odrębnym problemem kontroli jakości harmonogramu jest analiza ryzyka niedotrzymania terminów dyrektywnych oraz bieżąca kontrola postępu robót. Aplikacje do planowania przedsięwzięć 5D umożliwiają śledzenie postępu prac na poszczególnych działkach. Należy zauważyć, że przy realizacji robót o charakterze powtarzalnym istnieje duże prawdopodobieństwo wyspecjalizowania się brygad roboczych, co skutkuje poprawą ich wydajności i wzrostem tempa robót wraz z przechodzeniem na kolejne działki robocze. Ocenę dopasowania pierwotnego harmonogramu oraz
prognozowanego, symulowanego przez aplikację komputerową na podstawie bieżącego tempa robót, można śledzić na histogramach. Rysunek 5 przedstawia histogram pierwotnego i prognozowanego zapotrzebowania na pracę.
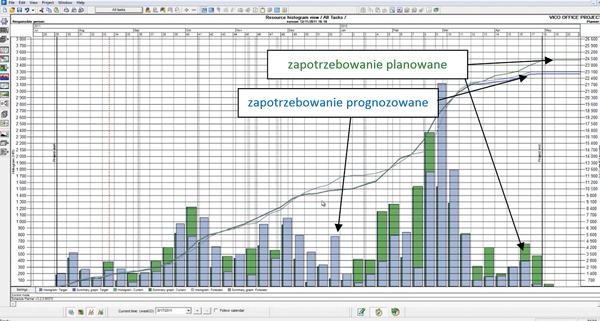
Rys. 5 Histogram planowanego i prognozowanego zapotrzebowania na pracę, widok z programu Vico
Podsumowanie
Wielowymiarowe podejście do zagadnień planowania robót budowlanych, wykorzystujące koncepcję metody LBS, jest zagadnieniem skomplikowanym, ale daje planującemu duże możliwości kontrolowania przebiegu prac i oceny jakości ich prowadzenia na każdym etapie budowy. To bardzo istotny aspekt wspomagania planowania realizacji robót. W zintegrowanym planowaniu 5D robót niezwykle cenne jest także to, że każda zmiana konstrukcyjna przekłada się niemal automatycznie na harmonogram robót, co pozwala na koordynację całego przedsięwzięcia w czasie rzeczywistym. Oczywiście tak jak w każdym systemie doradczym, również i tu planista jest ostatecznym decydentem w zakresie definiowania zakresów robót oraz analizy jakościowej opracowanego harmonogramu prac.
dr inż. Anna Krawczyńska-Piechna
Literatura
1. K. Araszkiewicz, A. Tryfon-Bojarksa, A. Szerner, Korzyści ze stosowania BIM w realizacji robót inżynieryjnych z perspektywy wykonawcy, „Materiały Budowlane” nr 6/2016.
2. R. Kenley, O. Seppanen, Location based management for Construction – Pianning, Scheduling and Control, London – New York, Spon Press, 2010.
3. A. Krawczyńska-Piechna, A Concept of an Integrated Construction Planning System Involving Location-Based Scheduling Technique, Czasopismo Techniczne „Budownictwo”, zeszyt 2-B [6], 2014.
4. www.vicosoftware.com.





